Uncovering the Secret to How Insects Walk
Anyone who has watched ants march or beetles scurry knows that an insect’s many legs move in a coordinated way, according to set rules. But just how an insect goes about implementing those rules remains unknown. Is it due to the mechanics of the legs themselves, or neural messaging, or some combination of the two?
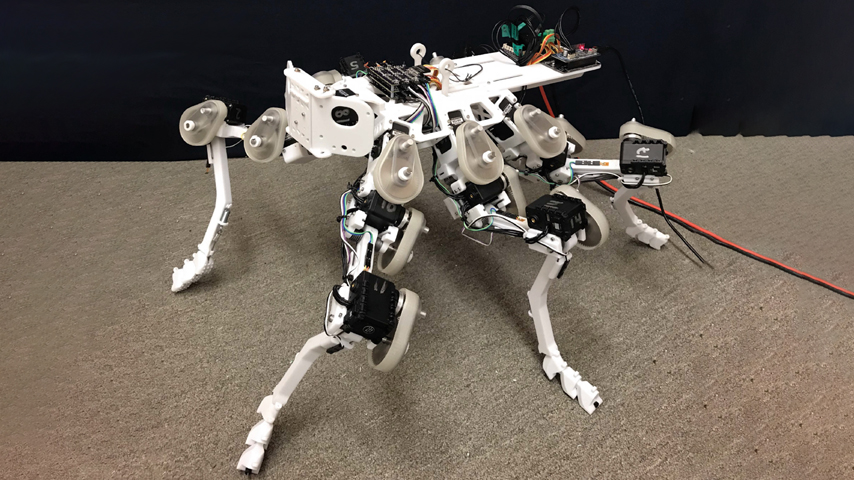
Nicholas Szczecinski set out to find out, not by dissecting an insect, but by building one. Specifically, a robotic fruit fly called Drosophibot.
A professor of mechanical and aerospace engineering at West Virginia University’s Statler College of Engineering and Mineral Resources and director of the Neuro-Mechanical Intelligence Laboratory there, Szczecinski has had some experience creating walking bugs, including a neuromechanical simulation to better understand how cockroaches skitter. Now he’s put those skills toward making a robotic insect that is more detailed and accurate than anything that’s come before it—not just for the sake of creating a more realistic robot, but to help us learn how real fruit flies ambulate.
More about biomemetics: Insect-Sized Robot Takes Flight
Many hexapod robots that have previously been built have a simplified body, limited degrees of freedom, and six more-or-less identical legs controlled entirely by whatever electronic brain the roboticists have programmed. Not very insectlike, it turns out.
“When we look at insects, that isn’t what we see,” said Szczecinski. “Every pair of legs has morphed to better suit some role.” A fruit fly’s front legs, for instance, are highly flexible—the flies can twist them around and use their feet to scrub their compound eyes. The middle legs, of fruit flies and other insects, tend to extend out to the side and are used for stability, while the hind legs often face backward and are used for thrusting the animal forward.
 The legs on the insect robot are surprisingly complex, with elastic coiled springs to imitate the bounce found in fruit fly legs and three strain sensors. Image courtesy: Nicholas Szczecinski, West Virginia University
The complexity that Szczecinski hoped to model doesn’t end there. The joints of all those legs are no simple servos that just go backward and forward with similar force each time, but highly tuned machines for nuanced interaction with the environment. The intended control is similarly complex. For example, a knee of a fruit fly has 150 neurons each that work together to accomplish something as simple as measuring the angle of that single joint. And there’s not just one electric highway that connects joints to the brain, but hundreds of neurons.
The legs on the insect robot are surprisingly complex, with elastic coiled springs to imitate the bounce found in fruit fly legs and three strain sensors. Image courtesy: Nicholas Szczecinski, West Virginia University
The complexity that Szczecinski hoped to model doesn’t end there. The joints of all those legs are no simple servos that just go backward and forward with similar force each time, but highly tuned machines for nuanced interaction with the environment. The intended control is similarly complex. For example, a knee of a fruit fly has 150 neurons each that work together to accomplish something as simple as measuring the angle of that single joint. And there’s not just one electric highway that connects joints to the brain, but hundreds of neurons.
“If you silence one of them, you don’t see a noticeable impact on the behavior,” Szczecinski said. “The ensemble working together is what matters most.”
Selected for you: Robotic Dandelion Seed
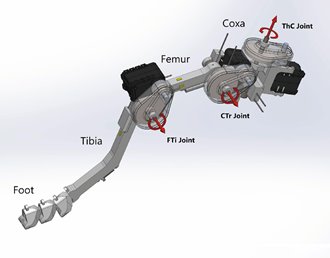
To create a robot similarly subtle and complex, Szczecinski gave his Drosophibot three different pairs of legs that are articulated differently to imitate the real things. Each leg also has feet (with mini cleats), surprisingly a novelty among insect-inspired robots. And the legs have elastic coiled springs to imitate the bounce found in fruit fly legs. More importantly, for understanding the fruit fly’s locomotion, each leg part has three strain sensors that tell the circuitry on its back what forces are happening on the ground.
 The placement of that circuitry, and the design of the thorax and abdomen, have been refined to better approximate the insect’s center of mass.
The placement of that circuitry, and the design of the thorax and abdomen, have been refined to better approximate the insect’s center of mass.
The one area where Drosophibot is completely unlike the insect is its size. The robot is more the size of a cat than a fruit fly. A feline-scale robot with the complexity and degrees of freedom of a fruit fly would be too heavy to move. As a result, the robot has several simplifications relative to the animal, including the removal of some joints in each leg. However, these changes don’t seem to affect the motion of the robot’s feet and the forces they experience.
Drosophibot has taken its few first steps, but it will be put to its larger purpose, of determining what makes a fly walk the way it does, in the coming year.
“The point of having this robot is to have one neuromechanical system that we can use to combine results from different studies, implement them, and then test them,” Szczecinski said. “It might be less expensive to do it all in simulation, but things like ground contact and friction are difficult to model accurately—better to take a machine and throw it on a lawn and see what it does.”
Michael Abrams is a writer in Westfield, N.J.
Nicholas Szczecinski set out to find out, not by dissecting an insect, but by building one. Specifically, a robotic fruit fly called Drosophibot.
A professor of mechanical and aerospace engineering at West Virginia University’s Statler College of Engineering and Mineral Resources and director of the Neuro-Mechanical Intelligence Laboratory there, Szczecinski has had some experience creating walking bugs, including a neuromechanical simulation to better understand how cockroaches skitter. Now he’s put those skills toward making a robotic insect that is more detailed and accurate than anything that’s come before it—not just for the sake of creating a more realistic robot, but to help us learn how real fruit flies ambulate.
More about biomemetics: Insect-Sized Robot Takes Flight
Many hexapod robots that have previously been built have a simplified body, limited degrees of freedom, and six more-or-less identical legs controlled entirely by whatever electronic brain the roboticists have programmed. Not very insectlike, it turns out.
“When we look at insects, that isn’t what we see,” said Szczecinski. “Every pair of legs has morphed to better suit some role.” A fruit fly’s front legs, for instance, are highly flexible—the flies can twist them around and use their feet to scrub their compound eyes. The middle legs, of fruit flies and other insects, tend to extend out to the side and are used for stability, while the hind legs often face backward and are used for thrusting the animal forward.
The legs on the insect robot are surprisingly complex, with elastic coiled springs to imitate the bounce found in fruit fly legs and three strain sensors. Image courtesy: Nicholas Szczecinski, West Virginia University
“If you silence one of them, you don’t see a noticeable impact on the behavior,” Szczecinski said. “The ensemble working together is what matters most.”
Selected for you: Robotic Dandelion Seed
To create a robot similarly subtle and complex, Szczecinski gave his Drosophibot three different pairs of legs that are articulated differently to imitate the real things. Each leg also has feet (with mini cleats), surprisingly a novelty among insect-inspired robots. And the legs have elastic coiled springs to imitate the bounce found in fruit fly legs. More importantly, for understanding the fruit fly’s locomotion, each leg part has three strain sensors that tell the circuitry on its back what forces are happening on the ground.
Discover the Benefits
Whether you’re an experienced professional or just starting your career, ASME’s membership community, resources and tools can help you with your lifelong journey.
The one area where Drosophibot is completely unlike the insect is its size. The robot is more the size of a cat than a fruit fly. A feline-scale robot with the complexity and degrees of freedom of a fruit fly would be too heavy to move. As a result, the robot has several simplifications relative to the animal, including the removal of some joints in each leg. However, these changes don’t seem to affect the motion of the robot’s feet and the forces they experience.
Drosophibot has taken its few first steps, but it will be put to its larger purpose, of determining what makes a fly walk the way it does, in the coming year.
“The point of having this robot is to have one neuromechanical system that we can use to combine results from different studies, implement them, and then test them,” Szczecinski said. “It might be less expensive to do it all in simulation, but things like ground contact and friction are difficult to model accurately—better to take a machine and throw it on a lawn and see what it does.”
Michael Abrams is a writer in Westfield, N.J.
The use of robotics in industrial settings continues to accelerate at a rapid pace. Explore this collection to learn more about automation, cobots, AI-enabled robots, customized robots, and drones.