Soft Robot Moves Like a Caterpillar
Soft Robot Moves Like a Caterpillar
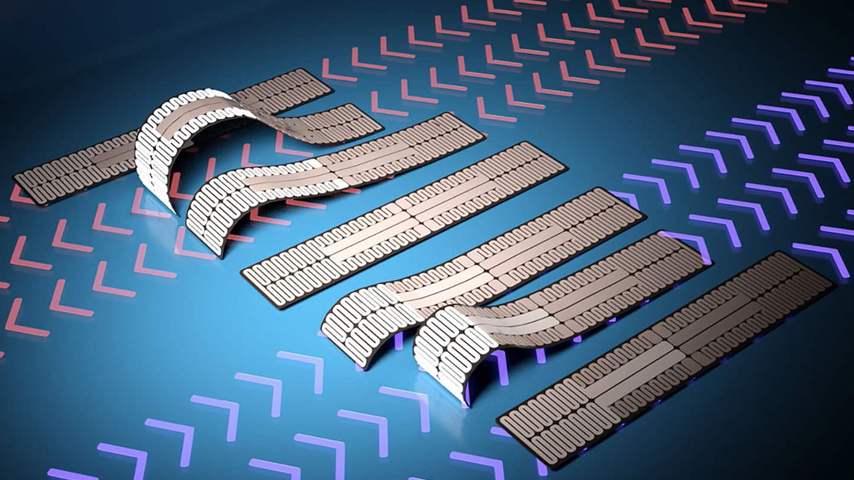
Using heat sent via nanowires embedded in a layer of polymer, this soft robot may eventually be used in search and rescue missions. It travels like a caterpillar, advancing forward and backward.
Once again, engineering achievements are often inspired by nature.
Become a Member: How to Join ASME
“Many animals and plants show incredible mechanical behavior as a result of evolution,” said Zhu. “We just need to observe closely enough and think deeply to understand the underlying principles.”
For the caterpillar robot, the curved body of a caterpillar during inching was the original inspiration. Movement is controlled by the local curvature of its body—it curves differently when the caterpillar pulls itself forward than when it pushes itself backward. Keeping these biomechanics in mind, Zhu and her team were able to create a caterpillar-bot prototype, using an innovative embedded heating system to create the same type of curvature and movement.
How it works
The caterpillar-bot consists of two layers of polymer, each responding differently when exposed to heat. The bottom layer contracts when exposed to heat. The top layer expands when exposed to heat. The heat is conveyed by a pattern of silver nanowires embedded in the expanding layer of polymer and controls the way the robot can be bent and steered forward and backward.
Lead points in the nanowire network provide a connection for applying an electric current. The researchers can control which sections of the nanowire pattern heat up by applying an electric current to different lead points and can control the amount of heat by applying more or less current.
The embedded nanowire heaters allow the team to control the movement of the robot in two ways. “We can control which sections of the robot bend by controlling the pattern of heating in the soft robot,” said Zhu. “And we can control the extent to which those sections bend by controlling the amount of heat being applied.”
More for You: Gel Snail Shows off Self-Healing, Conductive Material
The patterned soft heater (the silver nanowire networks) is embedded in a liquid crystal elastomer-based thermal bimorph actuator.
“The biggest challenge was creating a bimorph structure that could control its local curvature like a caterpillar,” said Zhu. “The heater that controls the bending of the robot needed to function stably and conformally with the curved body. That’s why the use of nanomaterials plays an important role. We adopted metal nanowires embedded in the polymer to generate distributed and stable heating.”
Traditional bimorph actuators yield almost a constant curvature along the body. “However, our work demonstrates a controlled curvature distribution along the structure,” she continued. “This curvature engineering results in a controllable friction distribution between the robot and the ground, which determines the crawling direction.” This concept can be applied to other soft actuators for advanced functions, such as swimming robots.
“The symmetric two-actuator design is innovative, even if it does not sound like much,” said Zhu. “Of note is that each actuator has the function of moving forward and backward. But the two-actuator design is essential for passing through under a narrow gap. Only when the robot has two actuators [each with bidirectional modes] can it pass through a confined, narrow gap. This is very important for the application of search and rescue.”
The team proved that the caterpillar-bot can pull itself forward and push itself backward. In general, the more current that was applied, the faster the caterpillar-bot would move in either direction. However, the team discovered there was an optimal cycle that gave the polymer time to cool, “essentially allowing the ‘muscle’ to relax before contracting again,” reported team member and postdoctoral researcher Shuang Wu. “If we tried to cycle the caterpillar-bot too quickly, the body did not have time to relax before contracting again, which impaired its movement.”
Future work
The strategy of distributed and programmable heating and actuation with thermal responsive materials offers new capabilities for smart and multifunctional soft robots.
“This approach to driving motion in a soft robot is highly energy-efficient and we are interested in exploring ways that could make this process even more efficient,” Zhu said. “Additional next steps include integrating this approach to soft robot locomotion with sensors or other technologies for use in various applications, such as search-and-rescue devices.
“In the next few years, we will investigate other types of interesting bioinspiration and develop soft robots that can carry out more complicated tasks. The patterned nanomaterial-enabled heaters can definitely be used for other applications such as wearable heating devices.”
Mark Crawford is a technology writer in Corrales, N.M.

Pulse of the Profession: Career-Ready Soft Skills
Using heat sent via nanowires embedded in a layer of polymer, this soft robot may eventually be used in search and rescue missions. It travels like a caterpillar, advancing forward and backward.
Related Content



