Video: Underwater Mapping Robot
Video: Underwater Mapping Robot
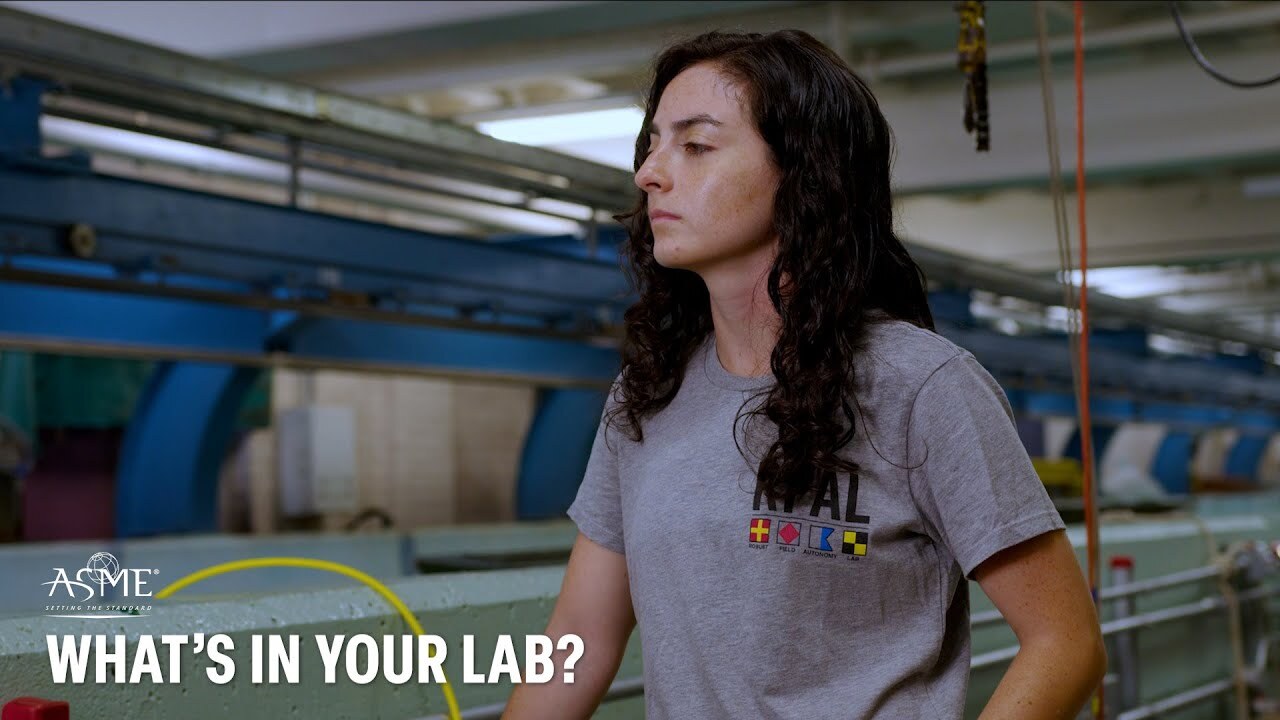
Dr. Brendan Englot of Stevens Institute of Technology and his Ph.D. students customize an underwater remotely operated vehicle, the BlueROV, with cutting-edge 3D sonar perception and mapping capabilities, enabling it to have navigational autonomy in an environment where GPS, RADAR, and LIDAR don’t work. Resident autonomous systems such as this can one day help to clean and maintain fish farms and renewable energy infrastructure such as offshore wind farms.
Related Content

5 Feedstocks for Biomass Energy Production
Apr 25, 2024
Wood, corn, even dung can heat homes and power industry. Discover energy from biomass.
ChatGPT Proves Smart as an Engineer, Promise as Teaching Tool
Apr 24, 2024
Researchers found that ChatGPT could pass the licensed engineer exam while exploring how AI could facilitate learning and teaching.

ASME Foundation Wins Grant for Technical Workforce Development
Apr 23, 2024

Harvesting Rare Earth Elements from Coal Ash
Apr 23, 2024
Environmental Engineer Laura Stoy founded a start-up clean-technology firm specifically to recover rare earth elements from coal ash across the United States.